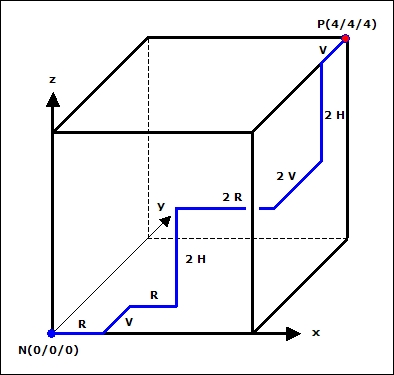
Ein Roboter kenne allein die Laufrichtungen RECHTS, VOR und HOCH (vgl. Skizze), er bewege sich den Gesetzen des Zufalls folgend vom Punkt N(0/0/0) aus von Gitterpunkt zu Gitterpunkt durch das dreidimensionale Koordinatensystem. Ausgewertet werden diverse Ereignisse, die bei einem Lauf aus genau 12 Schritten denkbar sind. Der Benutzer kann wählen, ob ein vollständiges Protokoll der Simulation (R = RECHTS, V = VOR und H = HOCH) angelegt oder aber lediglich das numerische Endergebnis ausgewiesen wird. Für sehr große n kann es im Falle der vollständigen Protokoll-Anzeige zu Browserverzögerungen kommen!